Что такое робототехника. Искусственный интеллект

- Информация о материале
- Категория: ИТ статьи
- Опубликовано: 17.02.2019, 00:54
- Автор: HelpDesk
- Просмотров: 1173

Робототехника-область искусственного интеллекта, занимающаяся изучением создания интеллектуальных и эффективных роботов.
Кто такие роботы?
Роботы-автоматическое устройство, созданное по принципу живого организма, предназначенное для осуществления производственных и других операций, которое действует по заранее заложенной программе и получает информацию о внешнем мире от датчиков.
Какие цели у роботов?
Самая главная цель роботов — это освободить человека от однотипной, рутинной работы.
Что такое робототехника?
Робототехника-это направление ИИ, которое состоит из электротехники, машиностроения и компьютерных наук для проектирования, строительства и применения роботов.
Аспекты робототехники
Роботы — механическая конструкция, разработаная для выполнения конкретной задачи.
Они имеют электрические компоненты , которые позволять контролировать и управлять машиной.
Они содержат определенного уровня компьютерные программы , которые определяют что робот должен сделать, когда он это должен сделать и как он будет выполнять свою задачу.
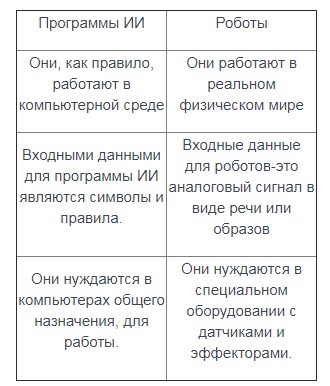
Разница между роботом и программами с ИИ
Локомоция робота
Локомоция-это механизм, который выполняет робот для передвижения в своей среде. Существуют различные типы движений:
При помощи ног
Колес
Сочетание передвижений на колесах и ногах
Передвижении
Этот тип локомоции, которая потребляет больше энергии во время ходьбы, прыжков, бега и т. д.
Данный тип локомоции требует большого количества двигателей для выполнения движений. Он подходит для грубой, а также гладкой местности, где нерегулярная или слишком гладкая поверхность делает его потребление энергии больше или меньше.
Робот может передвигаться в зависимости от количества его ног. Если робот имеет K ног, то количество возможных событий N = (2к-1)!. В случае двуногого робота (к=2), число возможных событий равно N = (2к-1)! = (2*2-1)! = 3! = 6. Следовательно, есть шесть возможных различных событий:
Поднять левую ногу
Отпустить левую ногу
Поднять правую ногу
Отпустить правую ногу
Поднять обе ноги
Отпустить вместе обе ноги
В случае к=6 ног, есть 39916800 возможных событий. Отсюда и сложность разработки робота прямо пропорциональна количеству ног.
Колесная локомоция
Требует меньшего количества двигателей для выполнения движения. Она намного легче реализовывается, так как есть меньше проблем со стабильностью в случае большого количества колес.
Стандартные колеса − вращаются вокруг оси.
Поворотные колеса − вращаются вокруг оси и смещения рулевого шарнира.
Шведская 45° и шведские 90° колеса − Омни-колеса, вращаются вокруг точки контакта, вокруг оси, и вокруг роликов.
Шаровые или сферические колеса Всенаправленные колеса, технически сложно реализовать.
Компоненты робота
Роботы сконструированы следующими компонентами:
Электропитание − роботы питаются от батарей, солнечной энергии, гидравлического или пневматического источника питания.
Приводы − они преобразуют энергию в движение.
Электродвигатели (переменного/постоянного тока) − они необходимы для вращательного движения.
Пневматические мышцы − они сжимаются почти на 40%, когда в них засасывается воздух.
Пьезоэлектрические моторы и ультразвуковой Моторс − лучшее для промышленных роботов.
Датчики − они дают информацию в реальном времени о целевой среде. Роботы оснащены датчиками зрения, чтобы вычислить глубину в окружающей среде. Тактильный датчик имитирует механические свойства сенсорных рецепторов человеческих пальцев.
Компьютерное Зрение
Эта технология искусственного интеллекта, с которыми роботы могут видеть. Компьютерное зрение играет важную роль в области безопасности, охраны здоровья, и развлечения.
Компьютерное зрение автоматически извлекает, анализирует и осмысливает полезную информацию из одного изображения или массива изображений. Этот процесс включает разработку алгоритмов для автоматического визуального восприятия.
Аппаратное обеспечение компьютерной системы видения
Оно включает в себя:
Устройства захвата изображения, такие как камеры
процессор
программное обеспечение
Устройство индикации для мониторинга системы
Аксессуары: кабели, разъемы и т.д.
Задачи компьютерного зрения
Распознавание текста − программа для преобразования сканированных документов в редактируемый текст.
Распознавание лиц − программа которая позволяет распознать характерные черты лица, эмоции и т.д.
Распознавание объектов − в будущем они будут установлены в супермаркетах, камерах хранения для отслеживания за определенными объектами.
Оценка положения − это оценка позиции объекта по отношению к камере, например как оценка положения опухоли в человеческом теле.
Область применения компьютерного зрения
Сельское хозяйство
Автономные транспортные средства
Биометрия
Распознавание символов
Криминалистика, охрана и видеонаблюдение
Инспекции промышленного качества
Распознавание лиц
Анализ жестов
Землеведение
Медицинские образы
Мониторинга загрязнения
Контроль процесса
Дистанционное зондирование
Робототехника
Транспорт
Применения робототехники
Робототехника играет важную роль в различных областях, таких как:
Производство − роботы используются для обработки материалов, резки, сварки, сверления, шлифовки и т. д.
Военное дело − автономные роботы могут достигнуть труднодоступных и опасных зон в период войны. Робот по имени Дакша, разработанный в оборонных исследованиях, помогает безопасно ликвидировать опасные для жизни объекты.
Медицина − роботы способны выполнять сотни клинических испытаний одновременно, восстановливать инвалидов, и выполнять сложные операции, таких как удаление опухоли головного мозга.
Разведка − роботы скалолазы, используются для исследований в космосе. Подводных беспилотники, используются для исследований в океане, и это лишь пару примеров.
Развлечения − Диснеевские инженеры создали сотни роботов для киноиндустрии.