Роботы-насекомые

- Информация о материале
- Категория: ИТ статьи
- Опубликовано: 28.02.2019, 10:59
- Автор: HelpDesk
- Просмотров: 1235

Исследователи из Гарвардского университета разработали метод, который позволит роботам-насекомым, находится в воздухе в несколько раз дольше, чем раньше.
Инженеры и ученые постоянно сотрудничают, чтобы создавать более совершенных летающих роботов. Природа является отличным источником вдохновения для этих целей. Летающие насекомые и птицы дают прекрасное представление о том, как летать в воздухе.
Микроскопическое воздушное транспортное средство (МВТС), обладающее способностью, остаться в воздухе в течение длительного времени, было бы неоценимым во многих приложениях: обеспечение обзора с высоты птичьего полета на зону бедствия, обнаружение опасных химических или биологических веществ или организация передачи сигнала в специальных сетях связи. Однако время полета воздушных роботов ограничено весом встроенного блока питания и сроком службы их механических компонентов. Кроме того, выносливость воздушных роботов существенно уменьшается, когда уменьшается размер устройства.
МВТС может существенно увеличить продолжительность своей миссии, сумев за что-нибудь закрепиться, например, за деревья, здания или линии электропередачи. С этим заданием отлично справляются птицы, летучие мыши и насекомые, которые прекрасно держатся на деревьях даже при сильном ветре и в дождь. Однако для робота это оказалось довольно сложным, и справиться с такой задачей смогли лишь небольшие устройства размером с птицу, используя пассивный биомиметический захват, микрокрючки или иголки.
Метод электростатического прилипания
Летающие роботы размером с насекомое могут стать более маневренными, а также значительно снизить себестоимость аппаратов. Однако их использование имеет ряд дополнительных проблем. Например, для прикрепления МВТС не подойдут ни механические способы, из-за эффекта дестабилизации асимметрично движущихся частей устройства, ни химическое прилипание, которое или будет необратимым, или требует большого давления. Отличной альтернативой, которая успешно себя проявила, является электростатическое прилипание.
Исследователи протестировали этот метод на дециметровом роботе(RoboBee, разработанный в 2013 году), который прикреплялся к вертикальным стенам. Такая форма крепления, по силе прилипания проигрывает некоторым другим методам. Однако с уменьшением размера устройства этот метод является все более привлекательным. Метод основан на электростатической силе, возникающей между встроенным в робота круглым электродом и поверхностными зарядами, находящимися на поверхности (разность потенциалов при этом достигает 1000 В). При такой «посадке» робот затрачивает в 500-1000 раз меньше энергии, чем во время полета, тем самым увеличивая время автономной эксплуатации. При необходимости отрыва робота от поверхности необходимо просто обесточить электроды.
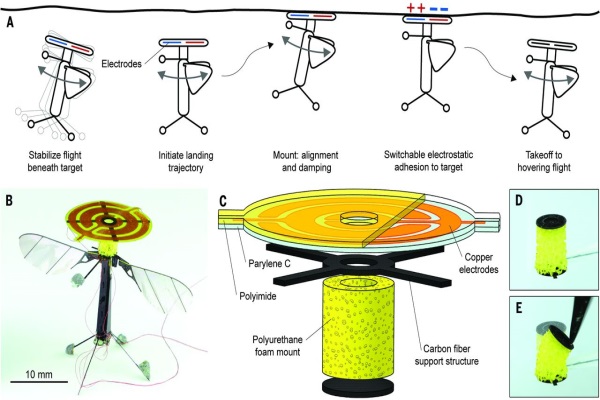
Прежде чем прикрепиться робот достигает состояния стабильного зависания под какой-либо поверхностью. При контакте с роботом на подложке возникают поверхностные заряды, что приводит к электростатическому притяжению. Эти поверхностные заряды рекомбинируют (исчезают), когда напряжение между электродами отключается. На рисунке видно, как летательный аппарат успешно прикрепляется к листу, стеклу и куску фанеры, а затем плавно садится на землю.
Следует отметить, что использование роботов-насекомых сопряжено со значительными трудностями в производстве, запуске, контроле. Тем не менее, уменьшение размеров роботов дает и новые возможности. Методика электростатического прилипания может также найти применение в других мелких робототехнических задачах.